


- Why Advanced Data Types Matter in Robotics AI
- Understanding Manipulation Trajectory Data
- 3D Mesh Human Hand Data for Dexterous Robotics
- Multi-Sensor Robot Trajectories: A Multimodal Approach
- Key Challenges in Advanced Robotics Data Collection
- Best Practices for Building High-Quality Robotics Datasets
- How Macgence Supports Advanced Robotics Data Needs
- The Next Wave of Robotics Innovation Relies on Superior Data
- FAQs
Advanced Robotics Data Types: From Trajectories to 3D Hand Meshes
The field of artificial intelligence is experiencing a massive shift. We are moving away from simple labeled datasets toward complex, multimodal robotics data. Early AI models relied heavily on static images and text, but embodied AI and modern robot learning require something much more robust. To interact with the physical world, robots need high-fidelity data that accurately captures movement, space, and physical forces.
High-quality data serves as the foundation for teaching machines how to navigate and manipulate their environments. Within this evolving landscape, several key data types have emerged as critical building blocks. These include manipulation trajectory data, 3D mesh human hand data, and multi-sensor robot trajectories. Each plays a distinct role in helping machines understand the complex physics of human motion.
Despite rapid advancements in algorithms and hardware, data remains the core bottleneck in robotics AI scalability. Collecting, processing, and utilizing high-dimensional data is incredibly difficult. Overcoming this bottleneck is essential for companies looking to build the next generation of autonomous systems.
Why Advanced Data Types Matter in Robotics AI
Traditional datasets, which often consist of static images and basic bounding boxes, are no longer sufficient for modern robotics. A bounding box can tell a robot where a cup is, but it cannot explain how to grasp it, how much pressure to apply, or how to move it across a table without spilling the contents.
We are seeing a rapid rise in applications requiring dexterous manipulation, nuanced human-robot interaction, and autonomous decision-making. To support these capabilities, models need a deep temporal understanding of how actions unfold over time. They also require immense spatial precision and the ability to process multimodal fusion, combining sight, touch, and motion sensing.
These advanced data requirements directly support a variety of cutting-edge use cases. Warehouse robots need exact spatial data to pack irregular items. Humanoid robots require complex movement data to walk and balance. Surgical robotics demand absolute precision that only high-fidelity motion tracking can provide.
Understanding Manipulation Trajectory Data
What is Manipulation Trajectory Data?
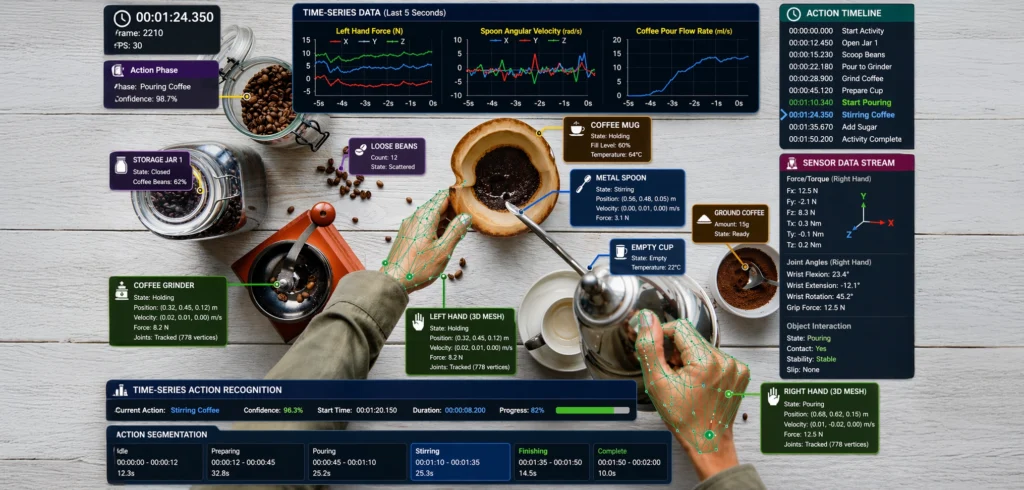
Manipulation trajectory data is time-series data capturing the specific actions of a robot or human over a given period. Rather than a single snapshot, it records a continuous flow of movement. This data typically includes joint angles, exact end-effector positions, force and torque signals, and object interaction states. It tells a machine exactly how a task was performed from start to finish.
Types of Trajectory Data
There are several ways to generate this crucial information:
- Human demonstration trajectories (LfD): Learning from Demonstration involves a human expert performing a task while sensors record their exact movements.
- Robot-executed trajectories: Data collected directly from a robot as it performs automated or teleoperated tasks.
- Simulation-generated trajectories: Data created within physics engines and virtual environments, allowing for rapid scaling before real-world deployment.
Key Applications
Manipulation trajectory data is essential for robot imitation learning, where a machine learns to mimic human actions. It is also heavily used in pick-and-place optimization for logistics. Furthermore, fine-grained manipulation tasks, such as cooking, folding laundry, or intricate industrial assembly, rely entirely on high-quality trajectory records.
Challenges in Collecting Trajectory Data
Capturing this data is highly complex. Sensor calibration issues can easily ruin a dataset if instruments are even slightly misaligned. Noise and inconsistencies during human demonstrations also create messy data. Finally, the “sim-to-real” gap remains a major hurdle; trajectories that work perfectly in a computer simulation often fail when applied to the physical friction and gravity of the real world.
3D Mesh Human Hand Data for Dexterous Robotics
What is 3D Mesh Hand Data?
3D mesh human hand data provides a detailed, three-dimensional geometric representation of a hand. Unlike standard video or skeleton tracking, a 3D mesh captures the full volume and surface of the hand. It records precise finger articulation, surface deformation as the skin presses against an object, and exact contact points during a grasp.
Why It’s Critical
Standard robotic grippers are highly limited. To achieve true human-like precision, robots need to understand how human hands actually work. 3D mesh human hand data enables dexterous grasping, allowing robots to handle fragile or awkwardly shaped items. It is also fundamental for teaching robots tool usage, from operating a power drill to using a kitchen knife safely.
Data Collection Techniques
Gathering this level of detail requires sophisticated equipment. Motion capture systems (MoCap) using reflective markers are a standard approach. Depth cameras combined with multi-view camera setups can also capture the hand from every angle. Recently, neural reconstruction methods have emerged, using AI to infer high-fidelity 3D meshes from standard 2D video feeds.
Use Cases
The applications for 3D hand data extend far beyond factory floors. It is vital for developing advanced prosthetics and assistive robotics that need to interact naturally with human environments. Humanoid robots rely on this data to interact safely with people. Additionally, AR/VR interaction systems use 3D hand meshes to create immersive, realistic virtual environments.
Multi-Sensor Robot Trajectories: A Multimodal Approach
What Are Multi-Sensor Robot Trajectories?
Multi-sensor robot trajectories involve the fusion of multiple data streams to give a robot a comprehensive understanding of its environment. Instead of relying purely on video, this approach combines vision (RGB/video), depth sensors, Inertial Measurement Units (IMUs), LiDAR, and force sensors.
Why Multimodal Data is the Future
Relying on a single sensor type is risky. If a camera is blinded by glare, a robot using only vision will fail. Multimodal data improves perception robustness by allowing the robot to cross-reference information. It enhances context awareness and greatly improves the model’s ability to generalize across new, unseen environments.
Example Pipeline
Creating multi-sensor robot trajectories requires a rigorous pipeline:
- Sensor synchronization: Ensuring all cameras, LiDAR, and IMUs record at the exact same microsecond.
- Data alignment: Spatially matching the data so the depth map perfectly overlays the video feed.
- Annotation & labeling: Tagging the multimodal data accurately.
- Model training: Feeding the fused data into the neural network.
Real-World Applications
Autonomous navigation systems, such as self-driving cars, depend heavily on multi-sensor fusion. Industrial robotics use this data to operate safely alongside human workers. Smart home assistants and mobile service robots also rely on these multimodal trajectories to navigate cluttered living rooms without colliding with furniture or pets.
Key Challenges in Advanced Robotics Data Collection
Building datasets for embodied AI is fraught with obstacles. The high cost of hardware setups—including LiDAR, MoCap studios, and robotic arms—prohibits many teams from collecting their own data. Data annotation complexity is another massive hurdle; labeling 3D meshes or force-feedback data requires specialized expertise.
Synchronization across multiple sensors is technically demanding, and a lack of standardized formats makes sharing and integrating data difficult. Furthermore, collecting data in real-world environments often triggers privacy and safety concerns, especially when cameras and microphones are recording continuously in public or private spaces.
Best Practices for Building High-Quality Robotics Datasets
To overcome these challenges, AI teams should adhere to a few core principles. Use hybrid data sources, blending real-world data with simulated environments to maximize volume and realism. Ensure strict temporal consistency across all sensor streams. Apply robust annotation frameworks that are specifically designed for 3D and time-series data.
Maintain dataset diversity by recording in various environments with different lighting, objects, and tasks. Finally, treat data collection as an iterative process. Implement continuous validation to catch errors early and refine the collection parameters.
How Macgence Supports Advanced Robotics Data Needs
Developing production-ready embodied AI requires vast amounts of flawless data. Macgence provides custom manipulation trajectory data collection tailored to your specific hardware and use cases. We build scalable multi-sensor data pipelines that take the burden of sensor synchronization and formatting off your engineering team.
Our teams possess deep expertise in multimodal annotation, 3D data processing, and robotics-specific QA workflows. Whether you are developing humanoid robots, advancing industrial automation, or leading a dedicated AI research team, Macgence delivers the tailored datasets necessary to train intelligent, safe, and highly capable robotic systems.
The Next Wave of Robotics Innovation Relies on Superior Data
The robotics industry is moving swiftly toward high-dimensional, multimodal data. Standard image classification is no longer the frontier. Today, manipulation trajectory data represents motion intelligence, teaching machines how to move with purpose. 3D mesh human hand data unlocks unprecedented dexterity, while multi-sensor robot trajectories provide robust, fail-safe perception.
Algorithms will continue to improve, but they will always be constrained by the information they are fed. Companies that recognize this bottleneck and invest heavily in advanced, high-fidelity datasets will undoubtedly lead the next wave of robotics innovation.
FAQs
Ans: – It is time-series data that captures the precise movements of a human or robot performing a task, including joint angles, positions, and force signals.
Ans: – It provides a volumetric, highly detailed geometric map of the hand, allowing robots to learn complex, dexterous grasping and tool usage.
Ans: – These are datasets created by fusing multiple data streams—such as video, LiDAR, depth sensors, and IMUs—to give a robot a complete understanding of its actions and environment.
Ans: – Industries including logistics, manufacturing, healthcare (surgical robotics and prosthetics), autonomous vehicles, and consumer smart home devices all rely heavily on advanced robotics data.
Ans: – Primary challenges include the high cost of sensor hardware, complex sensor synchronization, difficult 3D annotation processes, and bridging the gap between simulated data and real-world application.
Ans: – Companies can partner with specialized data providers like Macgence, who handle the complex hardware setups, data fusion, and rigorous annotation required for embodied AI.
 Previous Blog
Previous Blog



You Might Like

May 23, 2026
How Egocentric Gesture Recognition Labeling Improves Human-Robot Interaction
Embodied AI and first-person perception systems are reshaping how machines understand human behavior. As wearable cameras and point-of-view (POV) devices become more advanced, they generate massive amounts of egocentric video data. This unique perspective allows AI models to see the world exactly as a human user does. To make sense of this data, developers rely […]

May 22, 2026
Training Embodied AI with First-Person Video for Robotics
Embodied artificial intelligence marks a massive shift in how machines interact with their environments. Traditional robots follow rigid, pre-programmed instructions to perform repetitive tasks. Modern AI systems, however, need contextual visual perception to navigate unstructured spaces safely and effectively. To achieve this level of autonomy, engineers rely heavily on first-person video for robotics. This approach […]

May 21, 2026
The secret to smarter robots: Why Humanoid Robot Manipulation Data matters
Advancements in embodied AI and humanoid robotics are rapidly changing how machines interact with the physical world. While early robots were largely confined to rigid, pre-programmed tasks, modern machines require genuine manipulation intelligence to safely navigate and engage with complex, human-centric environments. Without this intelligence, a robot cannot properly grasp objects or assist humans in […]